


A busca subaquática é ineficiente por definição. A maior parte das missões de busca subaquática falham não devido à falta de tecnologia, mas devido ao facto de ser muito dispendioso iniciar o processo de busca. À medida que a profundidade da água e a necessidade de ferramentas complicadas surgem, os custos aumentam ainda mais. Os sistemas topo de gama, como os ROV (veículos operados remotamente) ou os ROUV (veículos subaquáticos operados remotamente), são concebidos para inspecções e intervenções sérias. Não se destinam a efetuar buscas cegas. São utilizados sobretudo para explorar as profundezas do oceano, sendo operados por pessoas à superfície. Os ROVs avançados podem mesmo efetuar várias tarefas debaixo de água. Assim, para quaisquer missões de busca iniciais, como inspecções subaquáticas gerais, operações de recuperação e inquéritos científicos, são geralmente excessivos. Além disso, é possível que não tenhamos orçamento suficiente para gastar em ROVs. Além disso, em alguns locais, podem ser inaplicáveis devido às suas grandes dimensões.
Assim, neste artigo, vamos discutir como as câmaras subaquáticas normais ou as câmaras portáteis de 360 graus podem ajudá-lo e manter os seus custos iniciais baixos. Na maioria dos casos, pode concluir o trabalho sem equipamento especializado ou ROVs.
Os ROVs não são geralmente necessários para missões de busca na fase inicial. O verdadeiro estrangulamento não é a capacidade, mas sim o custo e a logística da utilização. Os ROVs exigem tripulações treinadas, juntamente com embarcações de apoio e longos períodos de preparação. Os ROVs têm vantagens, mas também têm problemas operacionais e de custos. Assim, vamos discutir como as câmaras de inspeção subaquáticas normais podem ser excelentes nas partes iniciais de qualquer projeto.
O que são, de facto, missões de busca inicial e quais são as suas diferenças?
Estas são geralmente o oposto das tarefas de engenharia de profundidade e das missões pesadas. As missões iniciais de busca subaquática podem incluir a localização de objectos submersos, incluindo detritos. O rastreio de busca e salvamento também é abrangido. Em alguns casos, podemos fazer a deteção de anomalias nestes projectos. Basicamente, o objetivo das missões de pesquisa inicial é detetar a presença de algo. Nestas missões, a velocidade é importante e é necessária uma baixa profundidade de dados. No entanto, em inspecções completas, apoiadas por ROVs, os objectivos são geralmente interagir com as coisas ou mesmo repará-las. Neste caso, a necessidade de precisão aumenta, juntamente com uma maior fidelidade dos dados.
Geralmente, as missões de 70 a 80% não requerem capacidades ROV completas, mas apenas a confirmação visual. Assim, basicamente, são missões simples de reconhecimento e observação que podem ser efectuadas com as câmaras normais de largada. Mas quando é necessária uma inspeção e intervenção mais profundas, os ROV podem tornar-se necessários.
Compreender o ambiente antes de escolher o produto
Antes de pensar na câmara certa para o trabalho, seja ROV, câmara de queda, CCTV subaquático ou câmara de inspeção de 360 graus, é importante compreender primeiro o ambiente. O ambiente subaquático real pode ser bastante diferente do que vemos de cima ou imaginamos que seja. Pode haver diferentes profundidades, estruturas de corpos de água ou simplesmente diferentes aplicações com base nas suas necessidades.
Por exemplo, se a água for límpida e só quiser ver a aquacultura, um ROV é claramente um exagero e, sobretudo, um desperdício do seu tempo e dinheiro. No entanto, se houver necessidade de reparação subaquática ou de uma inspeção séria, em que as manobras são cruciais, um ROV pode ser a melhor opção. Basicamente, os ROVs são maioritariamente utilizados em vez de mergulhadores humanos devido à profundidade ou ao risco associado a determinados mergulhos. Na maioria dos outros casos, em que o tempo é crítico, como nas missões de recuperação, as câmaras de inspeção normais farão o trabalho rapidamente.
Porque é que os ROVs tradicionais são excessivos para esta fase?
Os ROVs são máquinas complexas. Têm os seus próprios propulsores, sonares, sistemas de navegação e vários outros componentes complexos. São equipados com cargas úteis multi-sensor e infra-estruturas de implantação pesadas. São dispendiosas, têm uma agilidade limitada e oferecem uma maior fricção de configuração. Além disso, existem riscos de utilização destas máquinas dispendiosas em condições incertas. Podem custar-lhe milhares de dólares e as reparações também podem ser bastante dispendiosas.
Enviar um ROV para verificar se algo existe debaixo de água é como utilizar uma grua para apanhar uma moeda.
Câmaras Portáteis de Inspeção Subaquática e respectivas Vantagens
A câmara subaquática, leve e com câmara, foi concebida principalmente para inspecções visuais e não para qualquer intervenção. São fornecidas com um sensor de câmara, mobilidade básica e um sistema de iluminação (luz branca ou infravermelha), alimentação por cabo ou sem fios e algum tipo de DVR para alimentação e gravação vitalícias. Com isto, reduzimos tudo a recursos e inteligência suficientes para ver debaixo de água.
Comparação entre ROVs e Inspeção Subaquática Portátil Câmaras
| Caraterística | ROVs tradicionais | Câmaras subaquáticas portáteis |
| Custo | Muito elevado | Baixa |
| Tempo de implantação | Horas/dias | Minutos |
| Tripulação necessária | Múltiplos | Um único operador é suficiente |
| Mobilidade | Elevado | Moderado |
| Caso de utilização | Intervenção | Deteção e inspeção |
| Risco | Elevado | Baixa |

Aplicações no mundo real e onde as câmaras de inspeção portáteis ganham
1.Busca e salvamento
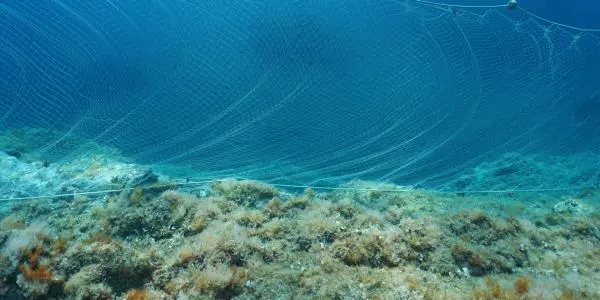
As câmaras de inspeção subaquáticas portáteis e de 360 graus são óptimas para uma análise rápida em águas turvas. São óptimas ferramentas de primeira resposta sem a necessidade de mergulhadores. Podem ser instaladas em poucos minutos e até um principiante pode iniciar a missão de busca. Dado que a câmara tem um bom sensor e iluminação para ver o que se passa dentro de água, é possível realizar quase todas as tarefas de busca com ela.
2.Inspeção de barragens e reservatórios
As estruturas subaquáticas requerem uma inspeção regular e as câmaras portáteis podem facilitar-nos as coisas. Desde a deteção de fissuras, detritos e bloqueios, até à criação fácil de relatórios sobre o ambiente subaquático, as câmaras portáteis podem ser perfeitas mesmo para grandes empresas que trabalham nestes projectos. Se quiser, temos um guia dedicado para escolher as câmaras certas para aplicações industriais.
3.Arqueologia subaquática
Estas câmaras são perfeitas para localizar locais antes de uma exploração subaquática completa. Em alguns casos, a velocidade da primeira visibilidade pode ser mais útil do que a profundidade da análise. Assim, para este tipo de tarefa, as câmaras portáteis podem definir um caminho para explorações posteriores, que podem ou não incluir ROVs.
4.Monitorização da aquicultura
Existem câmaras de pesca específicas disponíveis no mercado, mas qualquer câmara de inspeção simples pode ser utilizada para uma inspeção rápida do estado dos peixes e das redes. Na maioria dos casos, os ROV não serão necessários, exceto se pretender gravar imagens subaquáticas profissionais para filmes ou fins educativos.
Repartição dos custos: A verdadeira vantagem
Os sistemas ROV industriais requerem um custo mais elevado devido aos preços do equipamento, da tripulação e da embarcação. No entanto, as câmaras de inspeção leves podem ser totalmente configuradas por menos de 1000$.
Os ROVs têm custos ocultos de logística, formação, manutenção e tempo de inatividade, que podem ser evitados com os sistemas portáteis. A maior poupança não é o hardware, mas a velocidade de decisão. Quando sabe que pode fazer o seu trabalho com uma câmara subaquática normal, pode estar pronto para lançar o seu projeto em horas, se não em minutos.

Uma vez que um ROV demora algum tempo até poder começar a explorar, alguns problemas podem agravar-se. Algumas operações podem ser interrompidas ou o vento de salvamento pode diminuir. Uma câmara portátil permite-lhe ver as coisas em minutos, e esta é a maior vantagem que obtemos com elas. Não se paga qualquer taxa de hesitação de implantação devido às despesas do sistema. Em caso de falha, serão necessárias mais justificações por parte das equipas operacionais.
Limitações de câmaras de inspeção subaquáticas portáteis
Em comparação com os ROVs, as câmaras portáteis têm algumas desvantagens. A primeira é a incapacidade de interação. Como não existem manipuladores nestas câmaras, não podemos fazer coisas físicas debaixo de água. Assim, as principais vantagens podem ser sempre em termos de visibilidade e inspeção. As câmaras portáteis têm uma profundidade limitada em comparação com os ROVs industriais. Além disso, pode haver problemas de estabilidade em correntes fortes. Se a iluminação e a força do sensor não forem boas, podem ocorrer problemas de visibilidade, especialmente em águas turvas. Basicamente, as câmaras de queda ou mesmo os modelos de 360 graus funcionam melhor como sistemas de inspeção da Fase 1. Mas se pretender uma maior funcionalidade, dificilmente poderão fazer algo por si.
Os ROVs avançados podem utilizar braços robóticos para cortar, agarrar ou efetuar reparações, mantendo os mergulhadores humanos em segurança. Podem ser equipados com câmaras de cinema, permitindo aos mergulhadores gravar vídeos profissionais para uso profissional. As câmaras subaquáticas normais não podem substituir os ROV, mas como estão a melhorar de dia para dia, podemos esperar mais deles. Nas missões iniciais de busca e inspeção, podem ser perfeitas para poupar dinheiro e recursos.
A abordagem híbrida
Assim, começamos por colocar o nosso “Olho nas Profundezas”. Com uma câmara de inspeção simples e barata, começamos por identificar os alvos e fazer a observação. Criamos um relatório ou gravamos as imagens, se necessário. Agora, só se for necessário, pode ser acionado um ROV. Isto reduz em grande medida a utilização desnecessária de ROV. Nalguns casos, pode nem sequer ser necessário um ROV. Pode analisar diferentes opções modernas nas câmaras de inspeção subaquáticas e é possível que obtenha o dispositivo certo que pode eliminar a necessidade de um ROV. Pode ser em termos da profundidade a que a câmara chega, da qualidade do vídeo ou de outras caraterísticas. Em alternativa, quando sabe que o seu trabalho só será realizado com um ROV, é melhor não desperdiçar dinheiro numa câmara portátil, a menos que tenha em mente outras tarefas para ela.
Utilize uma câmara normal se tiver menos de 50% certeza de que o alvo existe. Também pode utilizá-la se a área for grande e indefinida. Em caso de restrições orçamentais e problemas de tempo, as câmaras simples são óptimas.
Utilize ROVs completos se o alvo for confirmado ou se for necessária interação. No caso de mapeamento de precisão, os ROVs podem ser perfeitos. Os ROVs podem ter outras caraterísticas específicas, como compartimentos tolerantes à pressão e sensores especializados para recolha de dados. Se estas são as suas necessidades especiais, não tem outra opção senão utilizar o seu ROV.
Tabela Capacidade vs Necessidade
| Capacidade | Necessário na pesquisa inicial | Disponível em sistemas portáteis | Disponível em ROVs |
| Transmissão de vídeo em direto | Sim | Sim | Sim |
| Sonar topo de gama | Raramente | Opcional | Sim |
| Braços robóticos | Não | Não | Sim |
| Navegação de precisão | Baixa prioridade | Limitada | Avançado |
| Interação de objectos | Não | Não | Sim |
| Profundidade dos dados | Depende | Baixa | Elevado |
| Clareza dos dados | Sim | Depende da câmara | Elevado |
A partir deste quadro, podemos concluir que a maioria das capacidades dos ROV não é utilizada nas missões em fase inicial. No entanto, os sistemas portáteis satisfazem todas as nossas necessidades. No entanto, o ambiente e os requisitos em diferentes missões podem variar, e é bom considerar todos os parâmetros antes de tomar a decisão final.
Impacto ambiental
É muito importante considerar o impacto global no ambiente subaquático aquando da instalação de qualquer tipo de dispositivo. Os sistemas mais pequenos perturbam menos a vida marinha do que os ROV. Têm um menor consumo de energia. Além disso, são menos intrusivos do que os pesados ROV. Por isso, é melhor não utilizar ROVs se achar que o trabalho pode ser feito com a ajuda de uma câmara normal. Em alguns países, é obrigatório pedir autorização e licenças para utilizar ROVs. Em zonas sensíveis, o governo pode mesmo restringir a sua utilização. Por isso, nesses casos, as nossas câmaras portáteis podem fazer o trabalho.
Conclusão
Os ROVs são máquinas especializadas e não podem ser substituídos por outros dispositivos portáteis. Têm os seus próprios objectivos e aplicações. No entanto, este artigo tem como objetivo reduzir a complexidade desnecessária e compreender as suas necessidades antes de começar a utilizar qualquer dispositivo nas suas tarefas iniciais. Queremos realçar a eficácia da passagem de uma abordagem "heavy-first" para uma abordagem "light-first" nas missões de inspeção subaquática. O futuro da exploração subaquática não começa com uma máquina que pode fazer tudo. O futuro começa com sistemas que respondem a uma pergunta de cada vez. Isto poupa-nos o nosso precioso tempo e recursos humanos.